今天晚上逛 数码之家论坛(好久没逛了,注册论坛也有6,7年了,这可是我大学时期最常泡的论坛了)一不小心发现自己发的陈年老帖,回忆满满啊。看看那帖子的语气,就像现在去看以前QQ空间的说说,宛如一个充满了稚气的傻逼,不过,毕竟是一个不错的回忆,于是,决定把它腾过来。
前言
帖子是关于我当年(14年)的毕业设计《六足轮式搜救机器人》,当年六足方案主要是舵机堆出来的,清一色像下面这个样子。

不过,当时(傲娇)的我并不愿意随大流,想到的更多的是液压(可惜液压成本太高,且零件加工要求高,舍弃了),最后选择了推杆来实现(也为最终夭折埋下伏笔),最终是这样子的(原图不知道去哪里了,直接论坛搬运)。
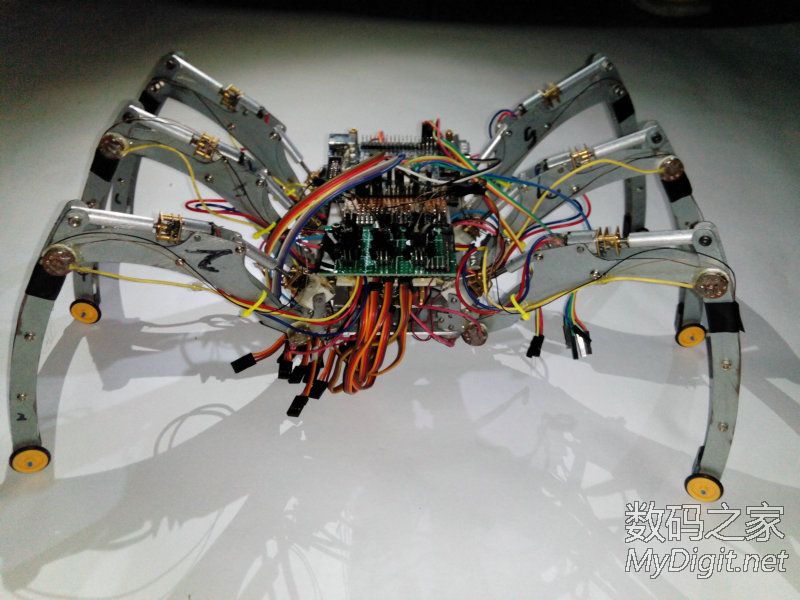
(我觉得这玩意,丑的很酷)
关于控制,采用了舵机内部电路,实现了每个关节的局部闭环,通过mcu内部定时器生成pwm信号控制每个关节的转动角度,整体行走采用三角步态实现。
夭折
这个项目最终由于时间比较紧,工程较复杂(机械设计-电路设计-编程),没有彻底完成,真的很遗憾,但是,有机会的话我还是要捡起来的。
细节
以下就是帖子的内容了。
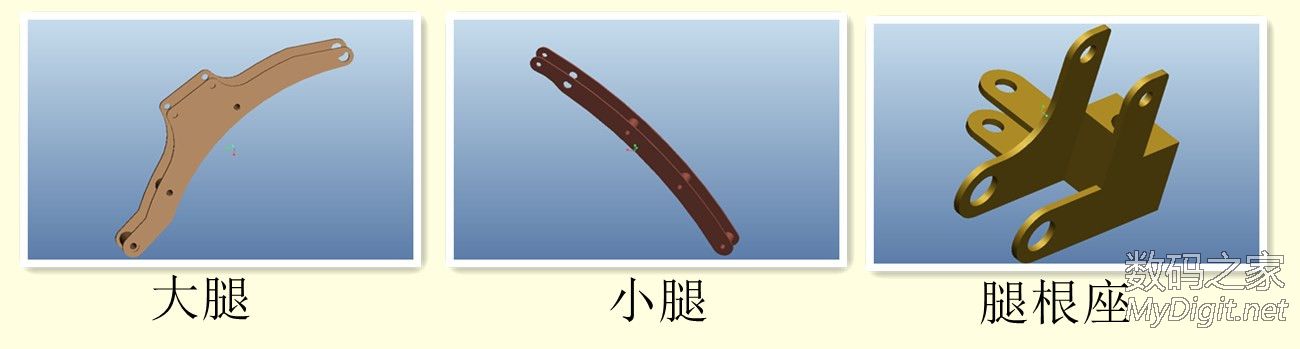
1.机械设计采用Pro/E建模,运动仿真,确定运动无干涉后生成dxf文件进行机加工(线切割)。

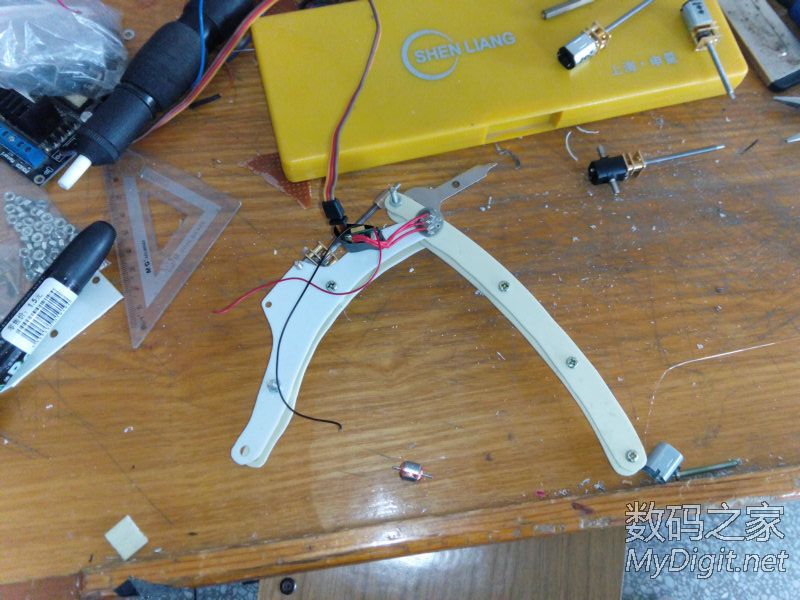
2.还是不放心设计,先做个塑料的模型看看。



3.测试先调试代码有没有问题,先用普通舵机试验一下,后期再拆舵机,取内部电路使用。

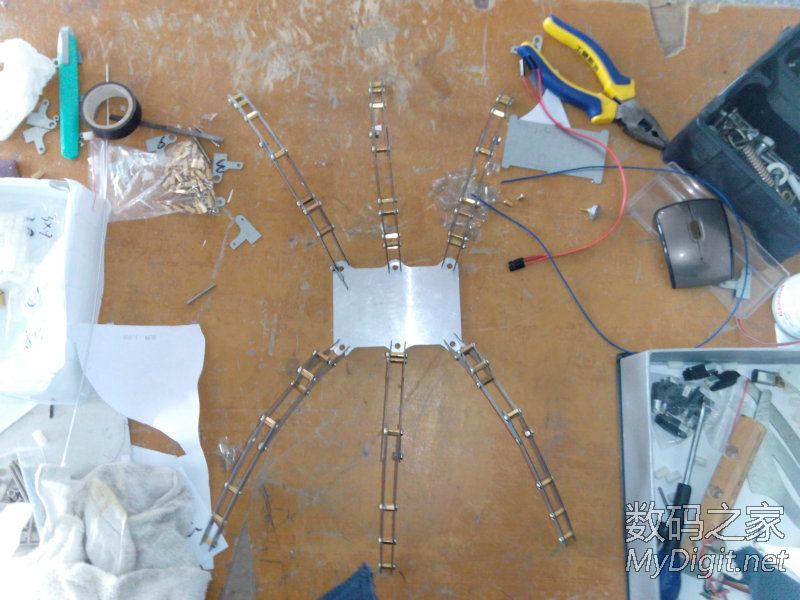
4.以上测试都没有问题,信(zhan)心(zhan)满(jing)满(jing)的送线切割,等了几天,收到了一堆铁板,组装成腿。


5.其他先不管,搭个形状先(满意的点点头)。



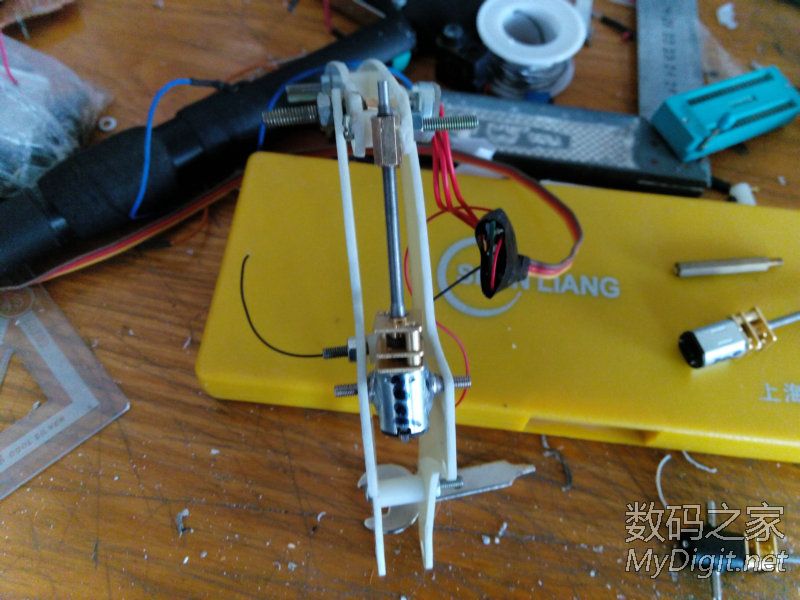
6.欣赏够了,该干点靠谱的事了。先上一个电机,采用丝杆与套筒形成推杆驱动,电机来自万能的淘宝,螺纹套筒纯手工打造,买的空心铝管,内径3mm(电机上的丝杆直径3mm),铝管前端扩孔至5mm,压如一个M3的螺纹柱即可。
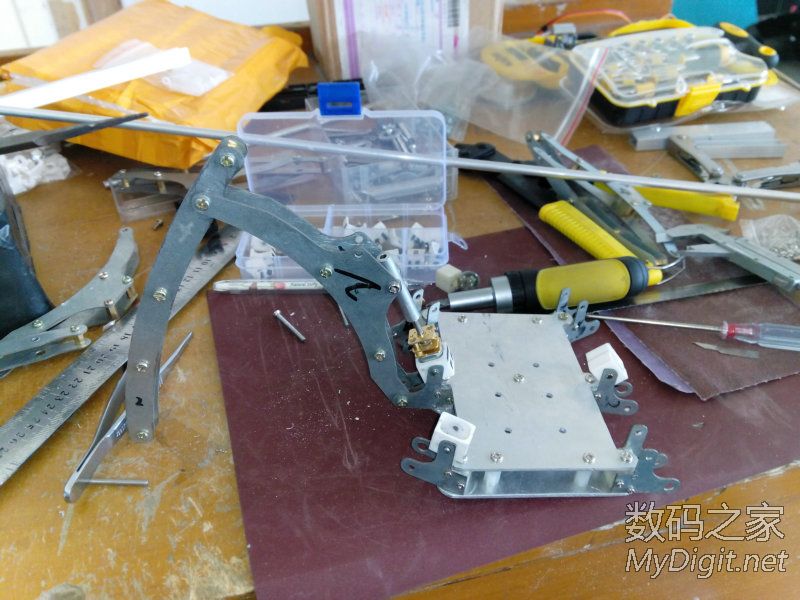


7.其实电机的固定才是最头疼的,没有合适的安装方法,当时也没有3D打印。


8.六足主体基板的安装过程没怎么拍,只有安装好的图了,纯手工打造,(实验室第一钳工岂非烂得嘘名)(其实应该设计成六边形会更好)。

9.电机全部焊接上线头,再摆拍一波。






10.整理一下,逼格满满。









11.细节



12.后期安装上轮子后的状态。

调试视频
http://player.youku.com/player.php/sid/XMzg1ODYxMDM3Mg==/v.swf

收到VS的v.jadxl.cn
666